The next generation of dexterous systems.
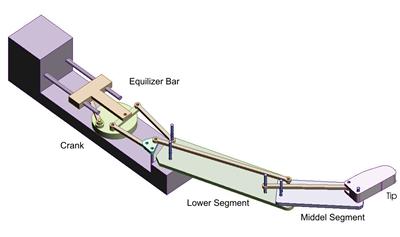
Under-actuated robotic fingers in a robotic hand allow significant reduction in manufacturing cost and control complexity. Fingers are designed for rapid repair and low cost following damage sustained in the field. The development of under-actuated systems is a recent development that will allow a range of objects to be grasped with ease.
Technological advantages
- Fully configurable to handle a wide range of shapes.
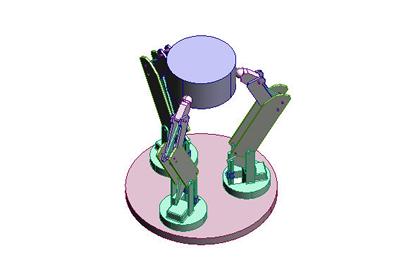
- Compact three fingered design, with minimal number of individual actuators.
- Low mechanical complexity, with interchangeable parts.
- Sensors can be located aware from the finger tips to improve reliability and robustness.
Technology Roadmap
Following the development of the Whole Arm Manipulator with its anthropomorphic five fingered hand, a number of design variations have been studies or prototyped.
Collaboration opportunity
The time and cost for systems will vary based on requirements. An example could include the development a small robotic gripper using a research assistant for 12 months at approx. £80K together with hardware and software costs typically in the order of £20K.
Fundamental research, for example developing a fully functional dexterous hand, could be conducted by a research student over three years, into control including the development of sensors, particularly to improve overall performance and increase autonomy which typically costs £80k a year.
If you would like to know more please contact Dr Richard Crowder rmc@ecs.soton.ac.uk
Other University of Southampton sites