Lightweight underwater robot inspired by most efficient animal in nature
Researchers at the University of Southampton and University of Edinburgh have created a squid-like robot that is ten to fifty times more efficient than propellor-driven small underwater vehicles.
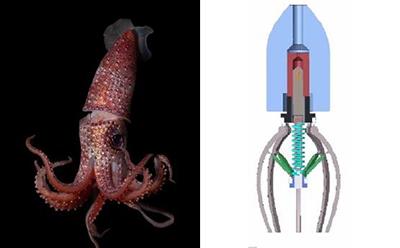
The flexible underwater robot mimics the style of nature’s most efficient swimmer - the moon jellyfish – to generate large water jets using very little power.
The quick and efficient prototype could unlock new possibilities for underwater exploration with a lightweight design and soft exterior. Scientists have published their findings in Science Robotics.
The new robot was developed by Southampton Naval Architecture Masters student Thierry Bujard and is the first submersible to demonstrate the benefits of using resonance for underwater propulsion. Resonance refers to large vibrations that occur when applying a force at the ideal frequency, like pushing a child on a swing.
Dr Gabriel Weymouth, Associate Professor in the School of Engineering, who supervised the project, says: “The great thing about using resonance is that we can achieve large vibrations of the propulsive bell with a very small amount of power; we just need to poke it out of shape and let the elasticity and inertia do the rest. This has allowed us to unlock the efficiency of propulsion used by sea creatures that use jets to swim.
“There are still many challenges and exciting possibilities to explore with soft underwater robotic technologies. We are now looking to extend the concept behind this robot to a fully manoeuvrable and autonomous underwater vehicle capable of sensing and navigating its environment.”