Research project: Aquatic Soft Robots for Environmental Sensing
Design and development of a soft-bodied shape-changing underwater vehicle with augmented manoeuvrability, NERC grant NE/P003966/1.
Design and development of a soft-bodied shape-changing underwater vehicle with augmented manoeuvrability, NERC grant NE/P003966/1.
Project background:
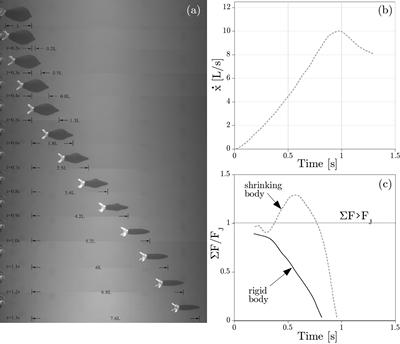
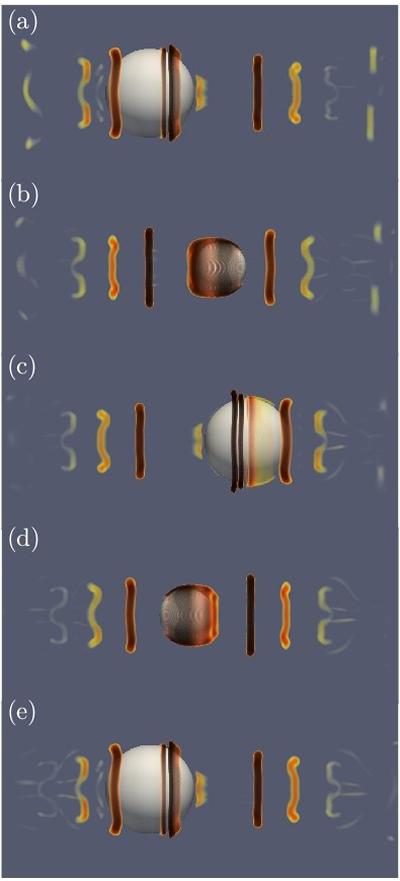
In the last decade, biomimetic unsteady aquatic propulsion via body shape variations has gathered significant interest because of the advantages it provides compared to propellers. This has major implications in the development of underwater vehicles with augmented capabilities in the frame of environment monitoring. Unlike the study on fish hydrodynamics, cephalopod-inspired (i.e. squids and octopuses) propulsion has accounted solely for the nature of the expelled jet these organisms employ for swimming, disregarding an additional important contribution on thrust generation which derives from the external shape change of their body.
Project objectives:
Soft robotics is a natural way of implementing shape-changing propulsion. This will produce the first prototype of aquatic soft robot that exploits its external shape change to enhance its efficiency in conjunction with a highly compliant structural design that will make it resilient to large deformation and impacts. This will pave the way for the development of a new breed of extremely agile autonomous vehicles endowed with unsurpassed manoeuvrability and unprecedented structural characteristics.
Work development:
This project is currently linked to the Next Generation Unmanned System Science (NEXUSS) Centre for Doctoral Training where the PhD project “Design and Control of Bio-inspired Pulsed-jet Underwater Vehicles with augmented maneuverability ” is being advertised. The project will be jointly supervised by Prof. Alberto Garabato at the National Oceanography Centre Southampton, the Fluid Structure Interaction Research Group of the Unviersity of Southampton and Prof. David Lane at the Ocean System Lab in Hariot Watt Unviersity. For details on the project see: http://noc.ac.uk/gsnocs/project/design-and-control-bio-inspired-pulsed-jet-underwater-vehicles-augmented
This project is part of the outreach and education activities of the University of Southampton. The department of Civil Maritime and Enverionmental Engineering has a long and well-established tradition of science divulgation and the “Aquatic Soft Robots for Environmental Sensing” project actively participates in some of the highest-impact activities for the enhancement of public awareness of science. The major event for the year 2017 will be the Smallpeice Trust Summer School on Marine Engineering and Ship Science. Sponsored by Seafarers UK, this event will engage schoolchildren in a 4-day course on ocean stewardship and marine environmental awareness while exposing the students to first-hand experience in renewable energy and ship building design.
https://www.southampton.ac.uk/nexuss/index.page