Southampton Engineering Students to proceed to next round of Marine Autonomy Challenge
SMART, the Southampton University Maritime Autonomy Robotics Team, has successfully passed the latest gateway in the Marine Autonomy Challenge (MAC) – a competition run by the Society of Maritime Industries (SMI).
Focusing on developing intelligent autonomous operation for Uncrewed Surface Vehicles (USV), the MAChallenge aims to map and detect ocean plastics and hydrocarbon pollutants. A cash prize of £2000 awaits the team that is able to successfully complete the five challenges comprising the competition. These consist of autonomous control and navigation of a custom designed 2m catamaran, obstacle avoidance, mapping of the environment and searching for surface ‘targets’ (plastic bottles, buoys).
SMART is composed of 4 members: Nefelie Hemrich (3rd Year Ship Science), Flavio Gheri (3rd Year Mechanical Engineering), Chihiro Hirai (MSc Marine Engineering & Autonomy) and Daniel-Iosif Trubacs (3rd Year Physics).
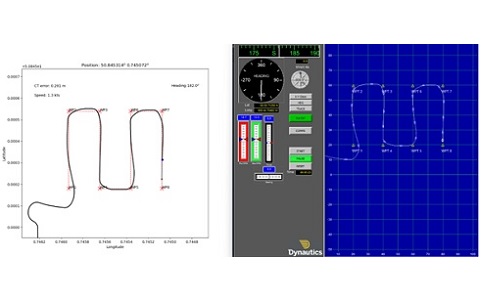
Following their participation in the Marine Autonomy & Technology Showcase 2022 (MATS2022) sponsored by SMMI, SMART presented its proposed approach to the challenge to a panel of SMI judges, who promoted them onto the next round. They have since had contact with mentors appointed by the National Oceanography Centre (NOC) to prepare them for the latest gateway, held on 17 March. This round involved using the Dynautics SPECTRE autopilot module and the ShipSim simulator package to navigate the USV around a track of waypoints whilst minimising its cross-track error.
The team presented its approach to the panel of SMI judges and its script was tested on the day to get the USV to follow a new set of waypoints. The team was able to successfully follow the new track and has now graduated onto the next round of the challenge. The next step will involve autonomously searching and mapping a two-dimensional plume of pollution using ShipSim.