
In the third week of September 2021 a research cruise aboard RV SOCIB went to the Marine Protected Area (MPA) of the Cabrera archipelago, located at the south of the island of Mallorca. Led by University of Southampton PI and IRIS member Dr Miquel Massot-Campos and supported by IRIS member Jose Cappelletto, along with collaborating researchers from the University of Sydney (Australia) and the University of the Balearic Islands (Spain) this cruise aimed to study the best methods to perform ecological surveys of a protected endemic seagrass in the Mediterranean Posidonia Oceanica (PO), which grows at water depths of up to 40 meters.
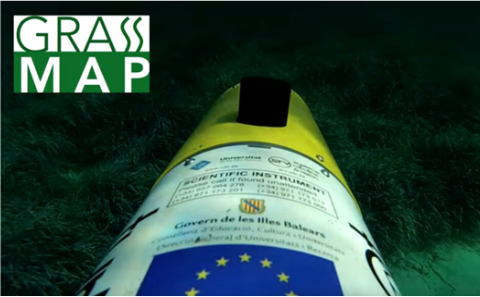
This seagrass is extremely important to the ecosystem, as it provides shelter and oxygen to marine creatures, stabilizes the seabed, increases seabed roughness breaking swell and wind-driven waves, encouraging the deposit of sedimentary particles, whilst filtering the seawater and providing the Balearic islands with their famous crystalline waters. Until recently, seagrass exploration has been carried out manually by divers. These dangerous and time-consuming tasks can be replaced with innovative underwater exploration approaches using Autonomous Underwater Vehicles (AUVs) and Artificial Intelligence (AI) guided image classification.
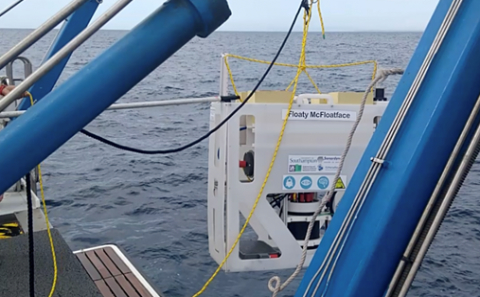
The main area sampled was at Cala Santa Maria, where previous diver studies and Uncrewed Aerial Vehicle (UAV) surveys have been published. In this cruise, two different underwater platforms were compared: a Lagrangian drifter “Floaty McFloatface” developed by the University of Southampton, and a Sparus II “Turbot” manufactured by IQUA Robotics. Turbot is equipped with two AVT Manta G-283 cameras and two Aditech Mangrove AL-6V video lights and Floaty equips two VRMagic VRmC-16 cameras and twelve Bridgelux Gen7 Vero 29 LEDs emitting a total 200,00 lumens of warm hue white light.
These platforms differ in the amount of required human support: the Lagrangian float drifts with sea currents whilst keeping at a constant altitude from the seafloor; whilst the AUV needs to have its trajectory pre-programmed and often relies on external localisation sensors to successfully achieve its mission with confidence. This cruise aims to answer the question of which intelligent sensing platform is better suited to replace divers at ecological monitoring for increased autonomy.
Both platforms performed well for the task of image gathering. Our initial impressions for the cruise were;
(1) the ease of operation of the drifter, just needing to turn it on and deploy it, whist for the AUV it involves skilled operators to pre-program its mission,
(2) both platforms performed well for underwater exploration and image gathering and
(3) the seagrass was found in the same expected areas, possibly indicating that it has not decreased from previous studies, but this will need further analysis.

The GRASSMAP science party benefits from the expertise of the University of Sydney in bathymetry-based survey planning and data processing; the local knowledge of the University of the Balearic Islands (UIB) and access to the AUV, whilst the University of Southampton provide their Lagrangian drifter and AI-based methods on underwater image classification to identify PO seagrass. The collaboration developed from the relationship of Dr Miquel Massot-Campos with the UIB (where he undertook his PhD) as well as the long standing collaboration of the Universities of Sydney and Southampton on underwater robotics research. RV SOCIB ship-time was provided free of charge for the GRASSMAP survey, as part of the Eurofleets+ project which received funding from the European Union’s H2020 Research & Innovation Programme (grant agreement No. 824077).
The IRIS Centre of Excellence at the University of Southampton has procured via EPSRC core equipment, SMMI and IROE CoE funding a new Sparus II AUV, as used in this cruise, with an advanced Inertial Navigation System for navigational accuracy. It is due for delivery in early 2022 and will be opened up for usage by IRIS CoE members. You can find more information on the equipment page.
For more information on GRASSMAP or to collaborate on this area please contact: miquel.massot-campos@soton.ac.uk
For more information or to collaborate on AI guided image classification please contact IRIS Co-director: b.thornton@soton.ac.uk